Robotic innovations are accelerating at a startling rate, with the development of our humanoid counterparts taking sometimes hitting very close to the real thing. Consequently, the integration of these human-like robots into our society is a priority for many research groups across the globe. Now, a research team from Tokyo University has brought us even closer to this goal by growing human skin on a robotic skeleton to create a biohybrid robot.
Feeling like a human

The development of robots made to look like humans has sparked a fiery debate in research circles, prompting some to call for a clearer line between inanimate machines and autonomous robots. To illustrate this distinction, picture a ceiling fan whirling around at a constant speed when turned on manually — this is an automated machine. But when we add a temperature sensor and a processor capable of storing user preferences and environmental data, the fan can then avoid obstructions and function autonomously based on the local temperature. The machine becomes an intelligent robot attuned to its environment — a first step towards becoming more human.
At present, engineers are taking this premise even further, working on robots that have more and more in common with humans. If robots do become human-like, they could become widely used in any number of applications, but developing robots that feel like humans do isn’t an easy feat.
Towards humanoids
The authors of a new study explain that blurring the line between humans and robots is one of the top priorities for humanoids tasked to interact with humans. But, presently, silicone skin used in robotics falls short when it comes to the delicate textures and expressions perceived by the human derma and underlying muscles. Additionally, synthetic skin can’t heal, with patches or a silicone sealant used to repair rather than regenerate worn or torn areas.
To overcome this challenge, researchers have fashioned living skin sheets that can bond to the robot’s frames. However, conforming these biological coverings to the framework’s uneven surfaces and sharp, dynamic joints has proven extremely challenging. It got even worse when the humanoid moves — the 3-dimensional (3D) metal chassis and joints damage the ‘skin’ even further, causing gross failure.
So a new solution was needed. In the new study, the team cleared this hurdle using a novel technique that can grow living human skin onto a three-jointed robotic finger. The human-like skin consists of living cells and an extracellular matrix-a 3d support system holding cells in place-exhibiting self-healing properties while allowing the jointed structure underneath to move freely.
“Our goal is to develop robots that are truly human-like,” first author Professor Shoji Takeuchi, from the University of Tokyo, told ZME Science in an email. “The silicone rubber covers that are commonly used today may look real from a distance or in photos or videos, but when you actually get up close, you realize that it is artificial. We think that the only way to achieve an appearance that can be mistaken for a human being is to cover it with the same material as a human being, i.e., living cells. Using cells would also allow the robot to work with the excellent biological functions of skin, such as its ability to self-repair.”

Biohybrid robotics
To fashion the biohybrid robotic finger, the team first assembled the framework and coated it with parylene, a polymer used to protect implanted medical devices from moisture and contamination in the body. Similarly, the coating prevented any toxic materials in the robotic skeleton from leaching into the human skin equivalent and damaging it.
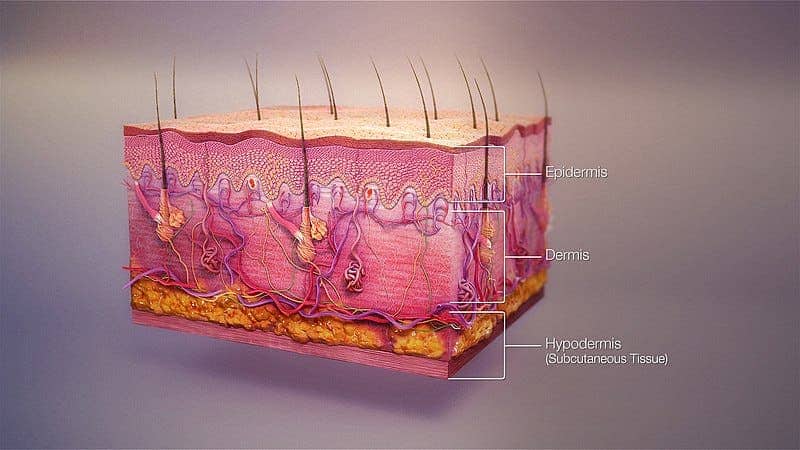
After this, they engineered a living dermis (the middle layer of skin responsible for protecting the human body from the outside world) that can “feel” different sensations and produce sweat. Once this was done, they then seeded the epidermis (the outermost layer of skin in the human body that protects against foreign substances and excessive water loss).
Expanding on this, the team explains that they placed the coated robotic finger in an outsized mold to engineer the dermis. Inside the mold, there was a solution of collagen and human dermal fibroblasts, the two main components that make up this connective tissue in the human body. To ensure the dermis was seeded correctly, the framework was cultured for 14 days, and an anchor was attached to the finger’s base.
Takeuchi explains how the study’s success hinges on this anchor because the collagen naturally shrinks, covering the robotic substructure tightly. Conversely, if there were no anchor at the base of the finger, the collagen would contract, retreating up the stem of the robotic digit. Like a primer, the dermis equivalent provided a uniform foundation for the next coat of cells (called keratinocytes) to form the epidermis.
This time, enough room was left in the mold to form a cap at the top of the structure to add extra tensile strength to the materials, enabling a uniform thickness of living skin across the frame. Results showed that this cap prevented damage to the human-like skin once the finger and joints were in motion.
“One particular difficulty was culturing the skin to match its three-dimensional aspect. We found that we could adapt the skin to the curved 3D surface shape by culturing it on site, rather than making it elsewhere and attaching to the surface. By installing an appropriate anchor structure, the entire surface could be covered,” Takeuchi told ZME Science.
What next
“This method can be used to cover the 3D surface of a robotic finger while controlling tissue shrinkage through anchor fixation. In addition, multidirectional seeding of keratinocytes enables us to uniformly form the epidermis layer,” the team stated in their paper.
When testing the human-skin equivalent for tensile strength and water resistance, these layers produced a skin-like texture possessing moisture-retaining properties. Additionally, the biohybrid structure had enough strength and elasticity to allow curling and stretching movements and could handle electrostatically charged polystyrene foam packing balls when allocated a task.
The team also used a skin graft technique to evaluate their skin’s self-healing properties. To accomplish this, they cut a hole in the biohybrid finger’s skin and applied a collagen bandage to the wound. Subsequently, this ‘patch’ was integrated with the human-like skin to withstand continuous movement.
Despite these promising results, the group cautioned that their crafted skin is much weaker than human skin, and they don’t expect this robot human-skin-equivalent to survive for very long. The team now plans to incorporate more biological structures into their skin to address these issues, such as sensory neurons, hair follicles, nails, and sweat glands.
Speaking to ZME Science about their results overall, Takeuchi concludes that “It was exciting to find that a robotic finger, completely covered with skin, could stretch and contract when it moved, without breaking, and that it could repair itself by cell proliferation when damaged. We believe this is a great step toward a new biohybrid robot with the superior functions of living organisms.”
The study is published in the journal Matter.







{kind=link}