It’s almost like a Disney movie: a roach helps a bird take off from its back in order to save their friends – except both the roach and the bird are robotic, and the recon mission was just a test conducted in a lab from the University of California, Berkeley. But this technology could save lives for real, researchers explain.

“While legged robots are great for uneven terrain, they have difficulty traversing tall obstacles,” the team writes in a paper describing their invention. “A flying millirobot has the ability to overcome tall obstacles and flapping-winged robots can have energy advantages over rotary and fixed wing fliers when it comes to mixedmodal flight (gliding, forward flight).”
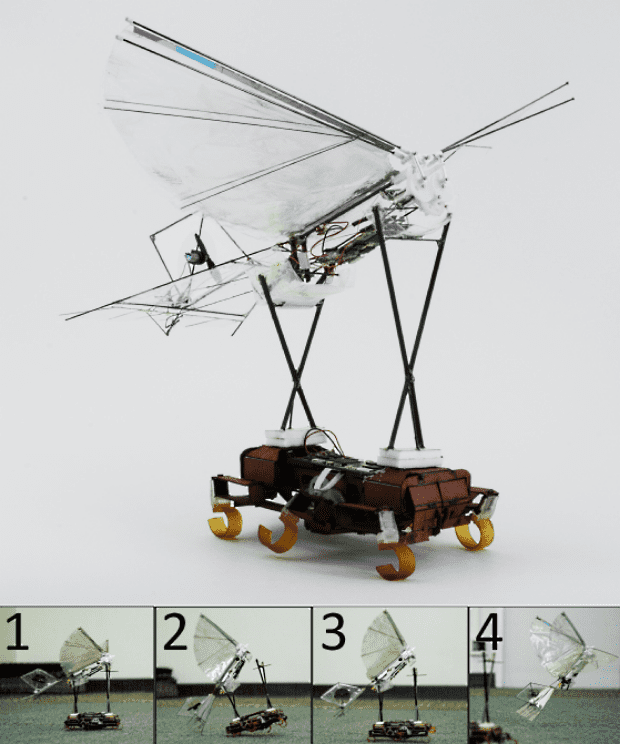
The two robots are actually called VelociRoACH and H2Bird, and together, they can accomplish what singular robots couldn’t. Basically, the roach acts as an aircraft carrier for the bird, which then takes off and performs the recon mission. The launch is needed because the H2Bird weighs about 13 grams, but doesn’t have what it takes to get off the ground at the right speed and angle – so its roach friend gives it a small boost. H2Bird can also start flapping its wings while atop VelociRoACH. Designing a single robot that does all this would be much more difficult than designing two robots that can team up.
“[B]y combining two different forms of locomotion in one platform, you can take advantage of (say) the efficiency and endurance of a ground robot with the range and versatility of a flying robot. However, designing one robot that can walk and fly tends to be both complicated and inefficient, which is why heterogeneous robot teams are often more appealing,” researchers stated in a press release announcing the development.
In other words, there is no ‘I’ in ‘Robot Team’ – if everyone works together, they can accomplish much more than they could on their own. This doesn’t make it only more efficient, but it also makes it cheaper.
“Placing the H2Bird on top of the VelociRoACH decreases the cost of transport of the VelociRoACH by approximately 16 percent. This decrease in the cost of transport would be useful in a situation where the VelociRoACH and the H2Bird had to both reach a point 80 meters away and the H2Bird had to fly 20 meters in the air, where the VelociRoACH cannot reach. In one case, both robots travel the 80 meters separately, and then the H2Bird continues the last 20 meters. In a second case, the VelociRoACH carries the H2Bird for the first 80 meters, then the H2Bird is launched and flies 20 meters. The second case consumes 25 percent less energy than the first. In situations such as these, cooperative locomotion would be more efficient than independent locomotion,” the press release continues.
Many engineers believe that this is the right approach, as opposed to focusing on Swiss-knife type of robots. Instead of cramming every wanted functionality onto a single system, you make separate systems and optimize them so that they can collaborate.
This type of system could be used to recon previously unavailable areas, and with further developments, has the true potential of saving lives.
“Coordinated Launching of an Ornithopter With a Hexapedal Robot,” by Cameron J. Rose, Parsa Mahmoudieh, and Ronald S. Fearing from UC Berkeley, will be presented this week at ICRA 2015 in Seattle.







{kind=link}