The soft mechanism could open up whole new fields of robotics, from biodegradable systems and wearable bots to moving architecture.

Image credits Li S., Vogt M. et al., 2017, PNAS.
Soft robotics has seen some amazing progress in the last few decades. This field of research is looking into how robots can benefit from less rigid frames, aiming to create systems that can bend, flex, and move more like organisms than industrial hardware. That’s all well and good if you’re trying to make machines that can be closely integrated with our bodies, like robotic suits and the like. Dexterity and flexibility, however, often come at the price of strength, given that soft materials are generally less resilient than, say, steel. This latter issue has so far placed a hard-cap on the usefulness of flexible bots (but not on their cuteness.)
Folding for success
Researchers at the Wyss Institute at Harvard University and MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) think they’ve found a way around that cap. The team has created a new kind of artificial muscle that they claim will bring strength to our softbots. In fact, the origami-inspired actuators are so much better than anything we have today, which totally surprised the researchers.
“We were very surprised by how strong the actuators [the artificial muscles] were,” says Daniela Rus, Professor of Electrical Engineering and Computer Science at MIT and one of the senior authors of the paper.
“We expected they’d have a higher maximum functional weight than ordinary soft robots, but we didn’t expect a thousand-fold increase. It’s like giving these robots superpowers,”
Each actuator is based on an inner, skeleton-like structure. This can be constructed out of various material, the team explains, be it plastic sheet or coiled metal. The skeleton is folded in a certain pattern, filled with fluid, and sealed inside a protective ‘skin’ (which can be something be as innocuous as a plastic or textile layer bag).
Proper motion is created through the application of a vacuum inside the bag. As the fluids move out, the skin collapses onto the skeleton and creates tension on the skeleton, causing it to bend. This simplicity is actually a very big plus of the system because it means no other power source or input is required to control how the muscle moves; its motions can be customized while the muscle is being built, simply by altering the shape or composition of the skeleton. The team showed how different skeleton shapes influence motion and overall performance, building devices that can shrink down to 10% of their original size, twist into a coil, or gently lift a flower off the ground.

This programmable nature woven into their skeleton is one of the muscles’ “key aspects”, says first author Shuguang Li, a Postdoctoral Fellow at the Wyss Institute and MIT CSAIL. Embedding function in form allows the muscles to be very compact and simple, compared to their counterparts. This making them more appropriate for applications where heavy machinery is a drawback, such as mobile or body-mounted systems.
“You essentially get that motion for free, without the need for a control system,” Li said.
Another advantage is that the muscles, in a limited sense, have built-in intelligence. According to Rus, a muscle that bends in a certain way can potentially help simplify the algorithms needed to run the machine. The muscles, she explains, have a simple on/off switch, so there’s no need to write or run lofty software on how to manage them. This frees up processor and memory space for other uses, without sacrificing mobility.
Like a mallard lifting a car
The muscles are also very strong. They can generate about six times as much force per unit of area than mammalian skeletal muscles (the ones you use to move). A 2.6 gram (0.09 oz) muscle can lift a 3-kilogram (6.61 lb) weight, which the team compares to a mallard lifting a car. Finally, it’s laughably cheap, and the team showed they can build a single muscle in under ten minutes from materials that cost less than a dollar.
Being powered by a vacuum, the origami-like actuators are “safer” than most other types of artificial muscle currently in testing, according to Daniel Vogt, co-author of the paper.
“Vacuum-based muscles have a lower risk of rupture, failure, and damage, and they don’t expand when they’re operating, so you can integrate them into closer-fitting robots on the human body,” he said.
The researchers made artificial muscles made from a wide range of materials, from metal springs or plastic sheets to packing foam. But perhaps most excitingly, they even made some out of PVA, a water-soluble polymer. Such devices could usher in robots that will work in natural settings with almost no environmental impact, as well as swallowable robots that will dissolve after performing their job.
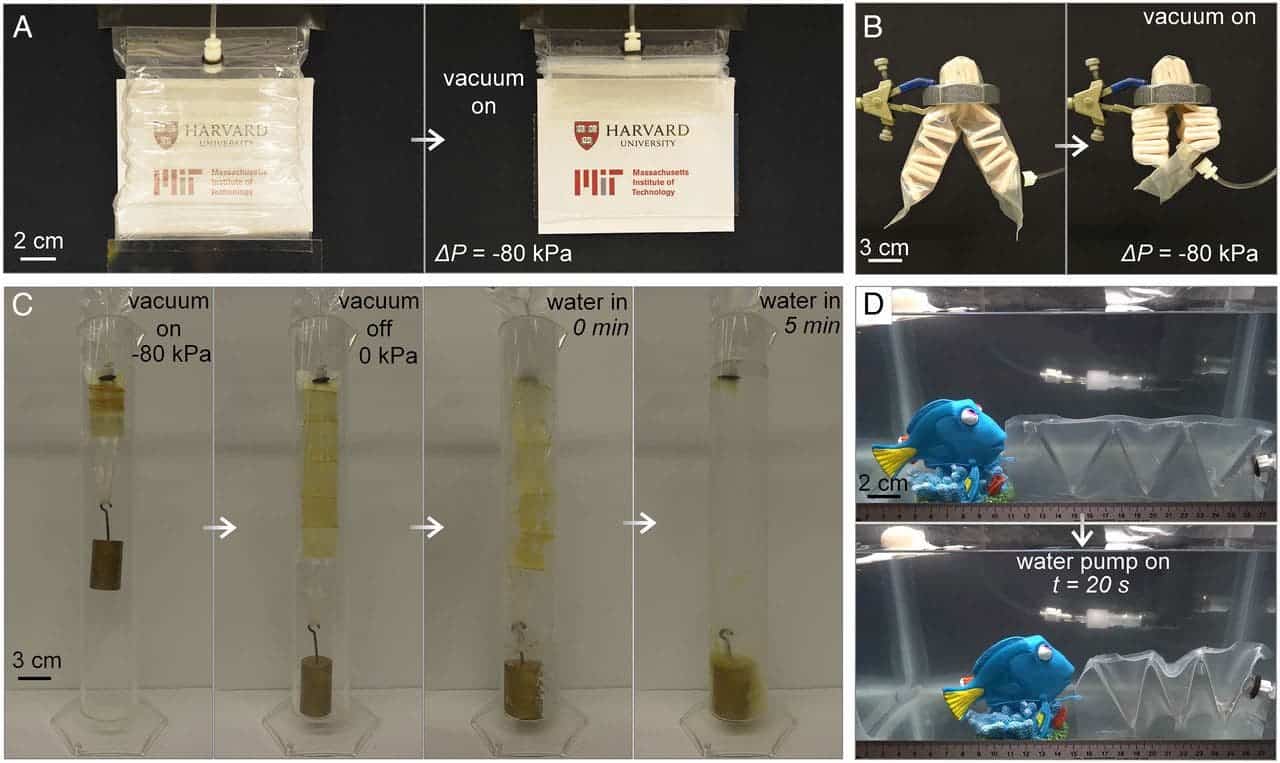
Image credits Li S., Vogt M. et al., 2017, PNAS.
The researchers also claim the muscles are “highly scalable”, with performance constant across different sizes. The paper’s corresponding author, Rob Wood, says this property lends well to many applications on multiple scales. Surgical and wearable robots, deep-sea robots, all the way to transformable architecture and large deployable structures for space exploration could be based on the actuators, he explains.
“Artificial muscle-like actuators are one of the most important grand challenges in all of engineering,” Wood adds. “Now that we have created actuators with properties similar to natural muscle, we can imagine building almost any robot for almost any task.”
“The actuators developed through this collaboration between the Wood laboratory at Harvard and Rus group at MIT exemplify the Wyss’ approach of taking inspiration from nature without being limited by its conventions, which can result in systems that not only imitate nature, but surpass it,” says the Wyss Institute’s Founding Director Donald Ingber, M.D., Ph.D., who is also the Judah Folkman Professor of Vascular Biology at HMS and the Vascular Biology Program at Boston Children’s Hospital, as well as Professor of Bioengineering at SEAS.
The paper “Fluid-driven origami-inspired artificial muscles” has been published in the journal PNAS.


