New research from the Beijing Institute of Technology wants to steal the design of one of nature’s best balancing devices — the tail — and put it in robots.
Nature has often faced the same issues that designers and engineers grapple with in their work, but it has had much more time and resources at its disposal to fix them. So researchers in all fields of science aren’t ashamed of stealing some of its solutions when faced with a dead end. Over the past decades, roboticists have routinely had issues in making their creations keep their balance in any but the most ideal of settings. The humble tail might help break that impasse.
Tail tale
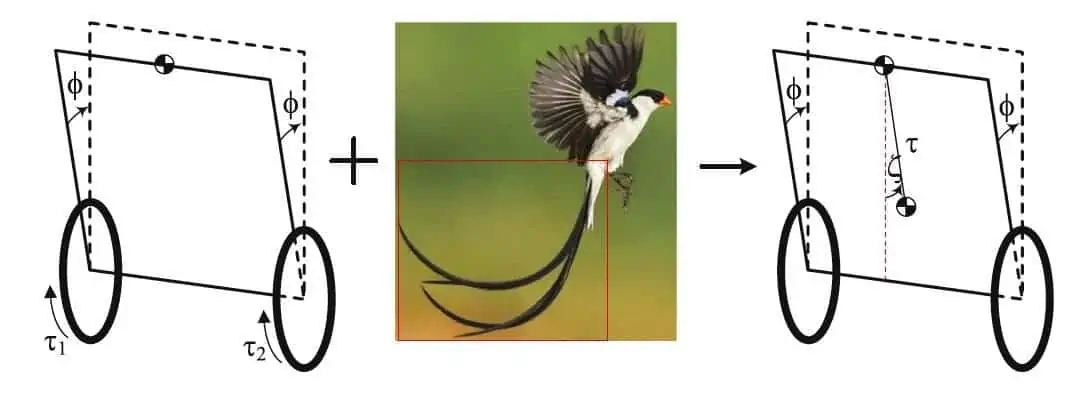
The bio-inspired, tail-like mechanism developed by the team can help their robot maintain balance in dynamic environments, the authors explain. The bot is made up of the main body, two wheels, and the tail component. This latter one is controlled by an “adaptive hierarchical sliding mode controller”, a fancy bit of code that allows it to rotate in different directions in an area parallel to the wheels.
In essence, it calculates and implements the tail motions needed to ensure the robot remains stable while moving around its environment.
There’s obviously some very complex math involved here. The authors explain that their system uses estimates of uncertainty in order to guide the tail. This is based on a theorem called the Lyapunov stability theorem, a theoretical framework that describes the stability of systems in motion. The tail then moves in specific patterns that are designed to increase the robot’s stability.
Most approaches to the issue of balancing two-wheeled vehicles today rely on collecting a vehicle’s body altitude data using an inertial measurement unit (IMU), a device that can measure forces acting on the robot’s body. This data is then processed and the results are used to determine a balancing strategy, which typically involves adjusting the robot’s tilt. These, the authors explain, typically work well enough — but they wanted to offer up an alternative that doesn’t involve tilting the robot’s body.
So far, the tail’s performance has only been evaluated in computer simulations, not in physical ones. However, these found it to be “very promising”, as it was able to stabilize a simulated robot who lost its balance within around 3.5 seconds. The team hopes that in the future, their tail will be used to make new or preexisting robot designs even more stable
The authors are now working on a prototype of the robot so that they can test its performance.
The paper “Control and application of tail-like mechanism in self-balance robot” has been published in the Proceedings of 2020 Chinese Intelligent Systems Conference.
Was this helpful?


