The vast expanse of the world’s oceans is home to a staggering variety of marine life. However, this fragile ecosystem is threatened by the growing pollution caused by human activities. This problem is particularly acute around coral reefs, which are teeming with life but are also highly sensitive to changes in water quality.
To combat this growing threat, Max Planck Institute for Intelligent Systems (MPI-IS) scientists at Stuttgart have turned to nature for inspiration and developed a new type of robot that could revolutionize how we clean up our oceans.
Gentle like a jellyfish
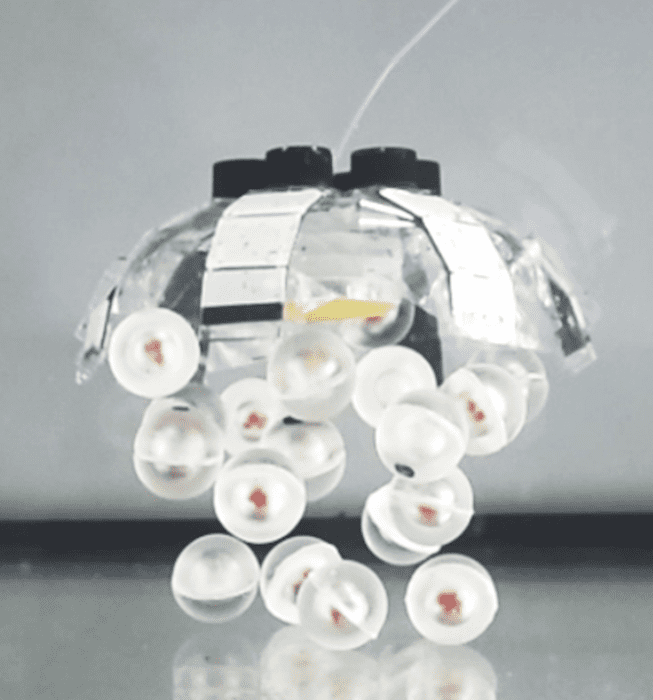
The new robot, called the Jellyfish-Bot, is inspired by — you’ve guessed it — the graceful jellyfish.
Unlike other underwater robots, which are often bulky and noisy, the Jellyfish-Bot is small, energy-efficient, and almost entirely silent. It uses electrohydraulic actuators to power its artificial muscles, which enable it to swim creating swirls underneath its body. This, in turn, helps collect waste particles and other objects, which can be transported to the surface for recycling.
This method can also allow the robot to collect fragile biological samples, such as fish eggs, without harming them. This would make it ideal as a helper bot for marine biology research. And because it operates almost silently, it has no negative impact on the surrounding environment, allowing it to interact gently with aquatic species.
“When a jellyfish swims upwards, it can trap objects along its path as it creates currents around its body,” said Tianlu Wang, postdoc in the Physical Intelligence Department at MPI-IS and first author of the publication. “In this way, it can also collect nutrients. Our robot, too, circulates the water around it. This function is useful in collecting objects such as waste particles. It can then transport the litter to the surface, where it can later be recycled.”
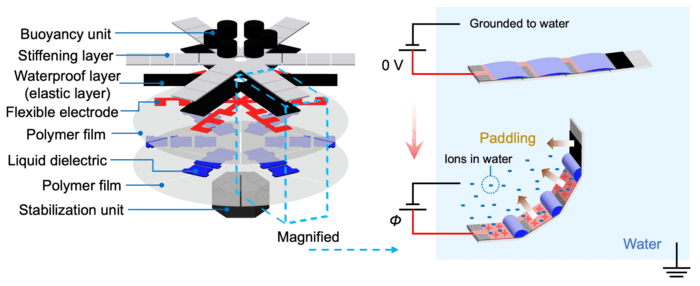
The robot consists of several layers, some stiffen it while others keep it afloat or insulate it from the surrounding water. Electrically powered artificial muscles known as HASELs (hydraulically amplified self-healing electrostatic) are embedded in the middle of the layers, allowing the robot to move and manipulate objects without physical contact.
In tests, the Jellyfish-Bot has been shown to operate faster and more efficiently than other underwater robots, reaching up to 6.1 cm/s while requiring only a low input power of around 100 milliWatts.
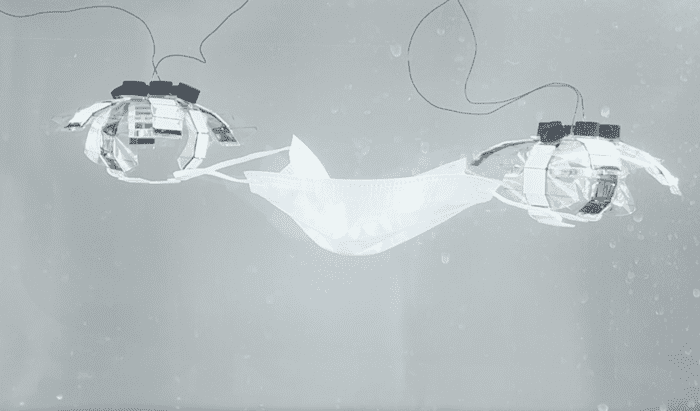
“We achieved grasping objects by making four of the arms function as a propeller, and the other two as a gripper,” said co-author Hyeong-Joon Joo from the Max Planck Robotic Materials Department. “Or we actuated only a subset of the arms, in order to steer the robot in different directions. We also looked into how we can operate a collective of several robots. For instance, we took two robots and let them pick up a mask, which is very difficult for a single robot alone. Two robots can also cooperate in carrying heavy loads.”
However, there are still some challenges to overcome. Currently, the Jellyfish-Bot requires a wire to power it, which limits its range of operation. The researchers are developing a wireless version of the robot to enable it to operate more freely in the ocean. They have already incorporated all the necessary functional modules, such as a battery and wireless communication parts, to enable future wireless manipulation.
Plastic makes up approximately 70 percent of ocean trash, which can damage the environment for hundreds of years. The Jellyfish-Bot, however, is specifically designed to manipulate objects such as litter and transport them to the surface. The hope is that underwater robots like the Jellyfish-Bot could one day assist in cleaning up our oceans, protecting marine life, and preserving this vital ecosystem for generations to come.
Their research was published in Science Advances.






{kind=link}