What do an ancient Japanese art and hi-tech robots have in common? Ask the researchers at the University of Washington (UW). They’ve developed small robots that can change how they move through the air by snapping into a folded position.
Origami is the ancient Japanese art of folding. But this art form is useful for more than just paper. More and more, researchers and engineers are drawing inspiration from origami and deploying into various technologies. From smart buildings to DNA treatment, origami has applications in numerous fields of science.
In this instance, scientists used a special type of fold called a Miura-ori fold. The Miura fold is a specific type of origami folding technique that allows a flat surface to be folded in a way that it can be easily expanded and contracted. Named after Koryo Miura, a Japanese astrophysicist, this fold is characterized by a series of interlocking parallelograms. When you pull on opposite corners of a sheet folded in this manner, the whole sheet expands or contracts in a single motion.

What makes the Miura fold particularly interesting is its efficiency and practical application. Already, the fold is used in various applications, most notably in the deployment of large solar panel arrays for spacecraft. These panels need to be compact during launch to save space and then fully expanded once in orbit. The Miura fold provides an elegant solution to this problem.
But in this case, researchers had a different plan: designing robots using the Miura fold.
Origami robots
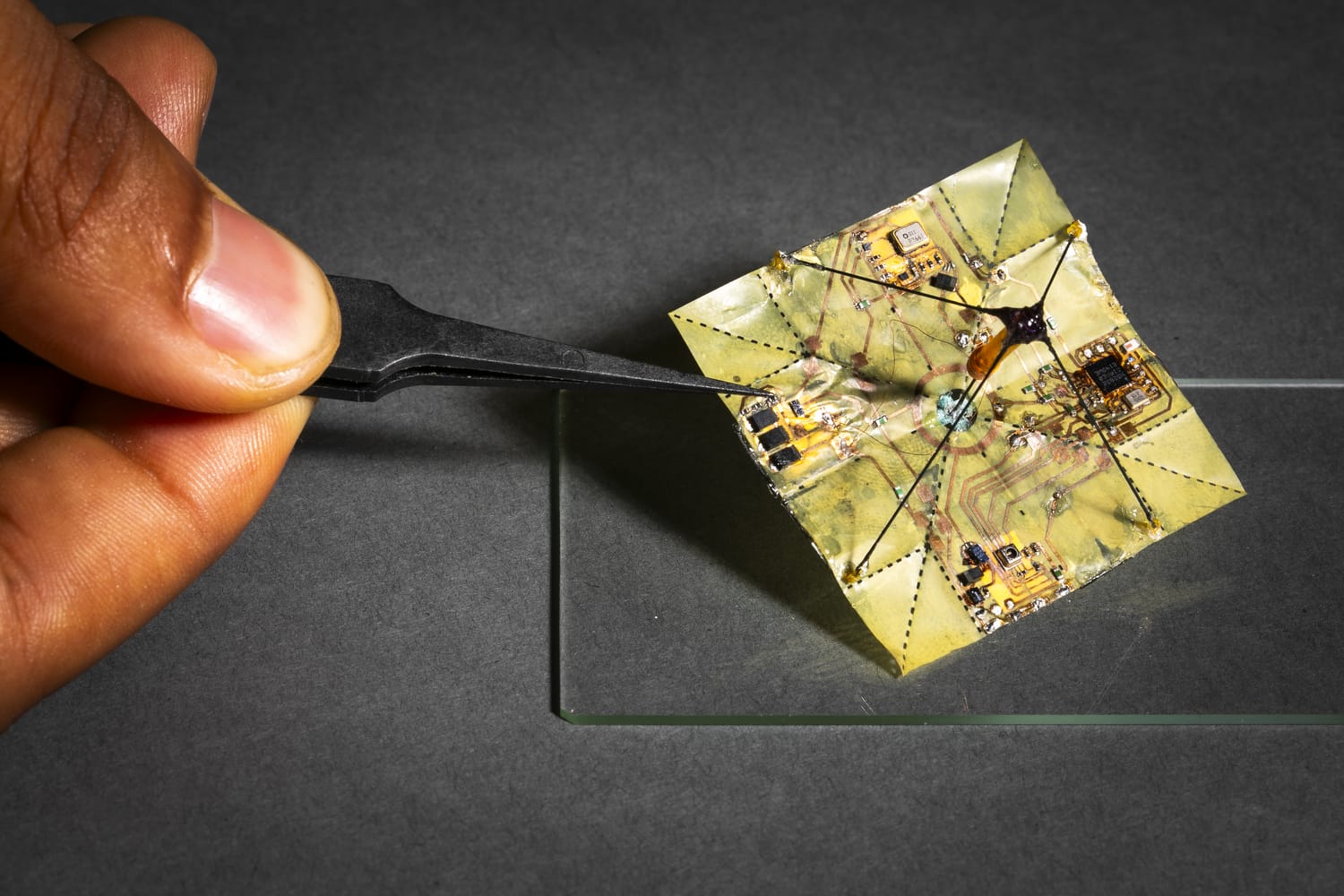
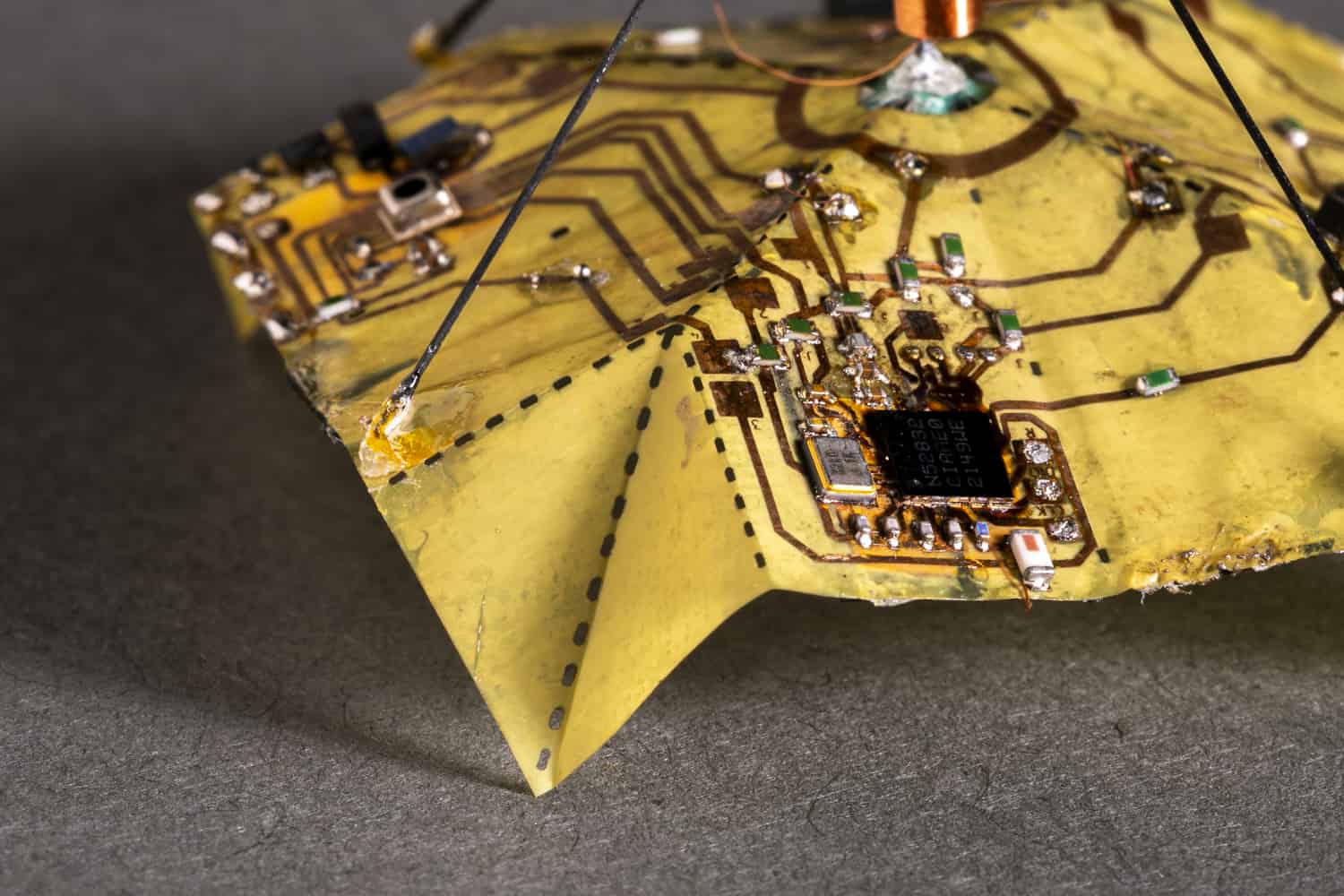
The new micro-robots equipped with this technology weigh less than half a gram — about as much as a fly. The idea is that they can be dropped from a flying device (like a drone) and can then disperse by shifting from one shape to another. They feature a battery-free actuator that converts energy into motion or action, allowing machinery to perform the desired task. The actuator serves as the “muscle” in the system, receiving signals from a control unit and responding by executing precise movements.
In addition, they have a solar power harvesting circuit and a controller that controls how they shift shapes mid-air.
When dropped from about 40 meters (131 feet), they can travel a distance of about a football field. They can snap into positions using a pressure sensor, a timer, or a bluetooth signal.
“Using origami opens up a new design space for microfliers,” said co-senior author Vikram Iyer, UW assistant professor in the Paul G. Allen School of Computer Science & Engineering. “We combine the Miura-ori fold, which is inspired by geometric patterns found in leaves, with power harvesting and tiny actuators to allow our fliers to mimic the flight of different leaf types in mid-air. In its unfolded flat state, our origami structure tumbles chaotically in the wind, similar to an elm leaf. But switching to the folded state changes the airflow around it and enables a stable descent, similarly to how a maple leaf falls. This highly energy efficient method allows us to have battery-free control over microflier descent, which was not possible before.”
Microfliers can monitor atmospheric conditions like temperature and light, aiding in fields like agriculture and climate change research. While the concept of battery-free, wind-propelled microfliers has been around for years, designing functional robots is actually very difficult. Traditional methods with motors are too heavy, and small wings require more energy than solar cells can provide. This work introduces a new approach: using origami structures to create battery-free microfliers that can alter their shape mid-air.
For now, the robots can only change from one state to another — but not reverse the change. In the future, researchers want to explore this type of approach more and see how it can move from one state to the other. The project page mentions:
“This approach opens up a new design space. For example, could we achieve finer grained control by switching back and forth between the states? Can we develop strategies to control their direction and land in precise locations? control descent and make these devices land in precise locations by switching back and forth between the states? We hope this work is the first step towards a future vision for creating a new class of fliers and flight modalities.”

By the way, if you want to build your own origami robot, here’s a simple tutorial:
Was this helpful?


