
Besides pollution and climate change, the world’s delicate reef ecosystems are also being destroyed by invasive species such as the venomous lionfish (Pterois). To stave off predators that harm coral, students at Worcester Polytechnic Institute (WPI) have devised an unconventional solution: a spear-wielding submersible robot. This mechanical knight is designed to safeguard coral by autonomously hunting down the lionfish.
Coral reefs provide many ecological and economic benefits but are currently in great peril due to the rapid expansion of invasive lionfish. These carnivorous fish are originally from the Indian and South Pacific Oceans and the Red Sea, but they’ve invaded Atlantic water after being imported to the tropics for aquariums. They have no natural predators in these waters, which have allowed them to breed uncontrollably, depleting resources and out-competing other native fish.
Lionfish are very successful in their newfound waters thanks to their incredible breeding potential — a female can lay up to two million eggs each year — and to the fact that they’re resistant to disease and infection. An adult can live up to two decades.
The invasive species are known for their voracious appetite, eating just about any type of fish they encounter. Their stomach can expand up to 30 times their normal volume and they regularly consume fish up to twice their size. And although lionfish don’t eat coral, they hunt the young reef fish that congregate around small coral reefs. These cleaner fish are essential to keeping coral reef algae at levels that will allow enough sunlight to reach the reef and produce oxygen. A single lionfish can destroy up to 80% of the reef fish within just five weeks of establishing its territory.
If left unchecked, coral reef could be doomed. Local governments have tried various strategies to keep the lionfish away, such as offering incentives to fish them. Although they have needle-sharp dorsal, pelvic and anal fins packed with venom that will cause immense pain if stung, lionfish are considered a delicacy in many restaurants around the world and sell quite well (and for a high price). However, there aren’t enough scuba divers for the job and the invasive species will also often dive to depths which divers can’t reach.
“There are economic and environmental benefits to this, and the fish are delicious,” said Brandon Kelly, one of the students who participated in the MQP (Major Qualifying Project) which designed the new spear-bot. “I’ve seen the massive devastation caused by these fish and it really made me want to work on this project. We felt like we could create some change in the world.”

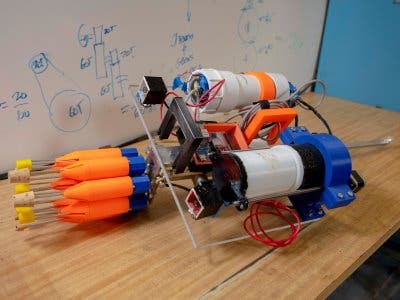
But this is where WPI’s new toy comes in. The prototype is designed to work untethered and autonomously hunt down lionfish by jabbing them with one of its eight spears. Each spear tip is detachable and buoyant, meaning that after a lionfish has been impaled, it will float to the surface for collection.
The robot is completely autonomous, carrying out its seek and destroy mission with the help of advanced computer vision libraries and models. In order to spot its target, the robot was fed a database of thousands of lionfish images, which were interpreted using a neural network software. Luckily, the algorithms were also exposed to images of what not to harpoon, such as human scuba divers. A water-tight chamber protects the robot’s motherboard and electronics from the highly corrosive salt water.
“The goal is to be able to toss the robot over the side of a boat and have it go down to the reef, plot out a course, and begin its search,” said Craig Putnam, senior instructor in computer science and associate director of WPI’s Robotics Engineering Program. “It needs to set up a search pattern and fly along the reef, and not run into it, while looking for the lionfish. The idea is that the robots could be part of the environmental solution.”
The robot is being designed to attach to a commercially available, autonomous submersible robot and during the upcoming 2019-19 academic year, a second team of students will focus on the robot’s global navigation system. This last step will enable the robot to navigate a 3-D search grid and seek lionfish.



{kind=link}