Researchers at Northeastern University (NU) have developed a groundbreaking robot capable of performing a wide range of tasks, including automated package delivery, Mars exploration, and search and rescue missions. Named the Multi-Modal Mobility Morphobot (M4), this robot draws inspiration from the diverse mobility skills exhibited by various animals, such as seals, chukar birds, and meerkats.

How does the Morphobot work?
The M4 has a unique ability to seamlessly switch between different mobility modes, enabling it to explore diverse environments and conquer challenging terrains with ease. Here’s how it all works, according to the Northeastern team:
“M4 repurposes its appendages with its transforming body and switchable shrouded propellers to switch to an unmanned ground vehicle (UGV), mobile inverted pendulum (MIP), unmanned aerial system (UAS), thruster-assisted MIP, legged locomotion, and loco manipulation in MIP mode,” the researchers note in their study.
To create the Morphobot, the researchers took inspiration from nature’s ingenuity, observing how certain animals adapt their limbs to suit their environmental requirements. For example, meerkats walk using all four limbs but when required, they can stand on two limbs like humans without any support.
Seals use flippers for swimming but on land, they use the same pair of appendages to waddle, and Chukar birds use their wings to assist their legs during climbing or ascending on land. They designed Morphobot such that it could mimic the “limb repurposing” actions shown by all these animals.
“We tried to integrate aerial, legged, and wheeled robot technology in a single platform, including actuation and sensing capabilities from all of these disciplines,” Alireza Ramezani, one of the researchers and assistant professor of electrical and computer engineering at NU, told ZME Science.
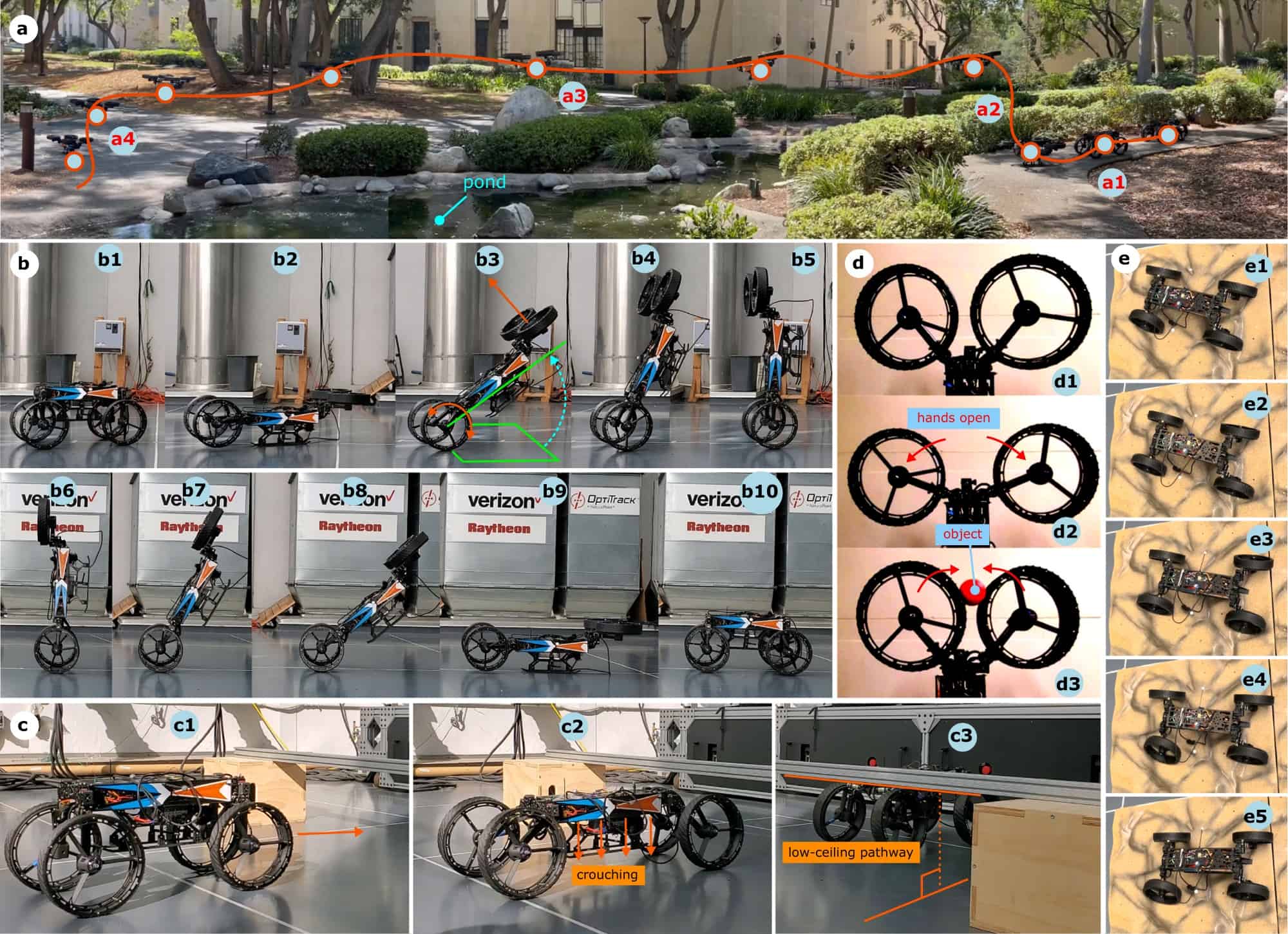
M4 can repurpose its appendages for various functions in more than one way. It can transform its limbs into four legs for walking, a four-thruster setup for flying, a two-wheel and two-thruster arrangement for wing-assisted incline running (WAIR) and tumbling, four wheels for crouching and autonomous vehicle-like movement, and two wheels for standing, rotating, and maneuvering through confined spaces.
The versatility of Morphobot makes it an ideal candidate for navigating spaces that are inaccessible to humans or challenging for conventional robots relying on a single mobility mode.
It could save lives
Moreover, the researchers highlight the value of Morphobot in emergency situations and natural calamities. With its scalable design and ample payload capacity, M4 can autonomously transport sensors and computers between locations. However, its true potential lies in its ability to assist in search and rescue operations during such crises.
“In the aftermath of unique incidents such as flooding, one event may accompany another that destroys the landscape differently. A hurricane may produce flooding and wind damage to roads and buildings. Or, a landslide may cause the movement of a large rock mass down a slope, dam a river, and create a flood. In these scenarios, M4 can leverage its versatility to achieve mobility that fits diverse mission requirements in search and rescue,” the researchers note.
Morphobot can perform aerial surveys of disaster-affected regions, search for survivors in collapsed structures, deliver essential supplies like food and medicine, and traverse damaged roads and debris-filled areas.
This way, a single Morphobot can execute the operations performed by a drone, a rover, and a delivery robot — all in the same package.
While Morphobot boasts impressive capabilities, there are still some limitations. For instance, researchers can repurpose the wheels into hand-like formations to grab objects. However, the object manipulation capabilities need to be extended with better hand design.
When asked about the future of Morphobots, Ramezani replied, “We have no plans to mass-produce M4 currently. However, a few platforms will be considered for future space explorations, such as Mars exploration in collaboration with NASA’s JPL.”
The study is published in the journal Nature.
Was this helpful?


